
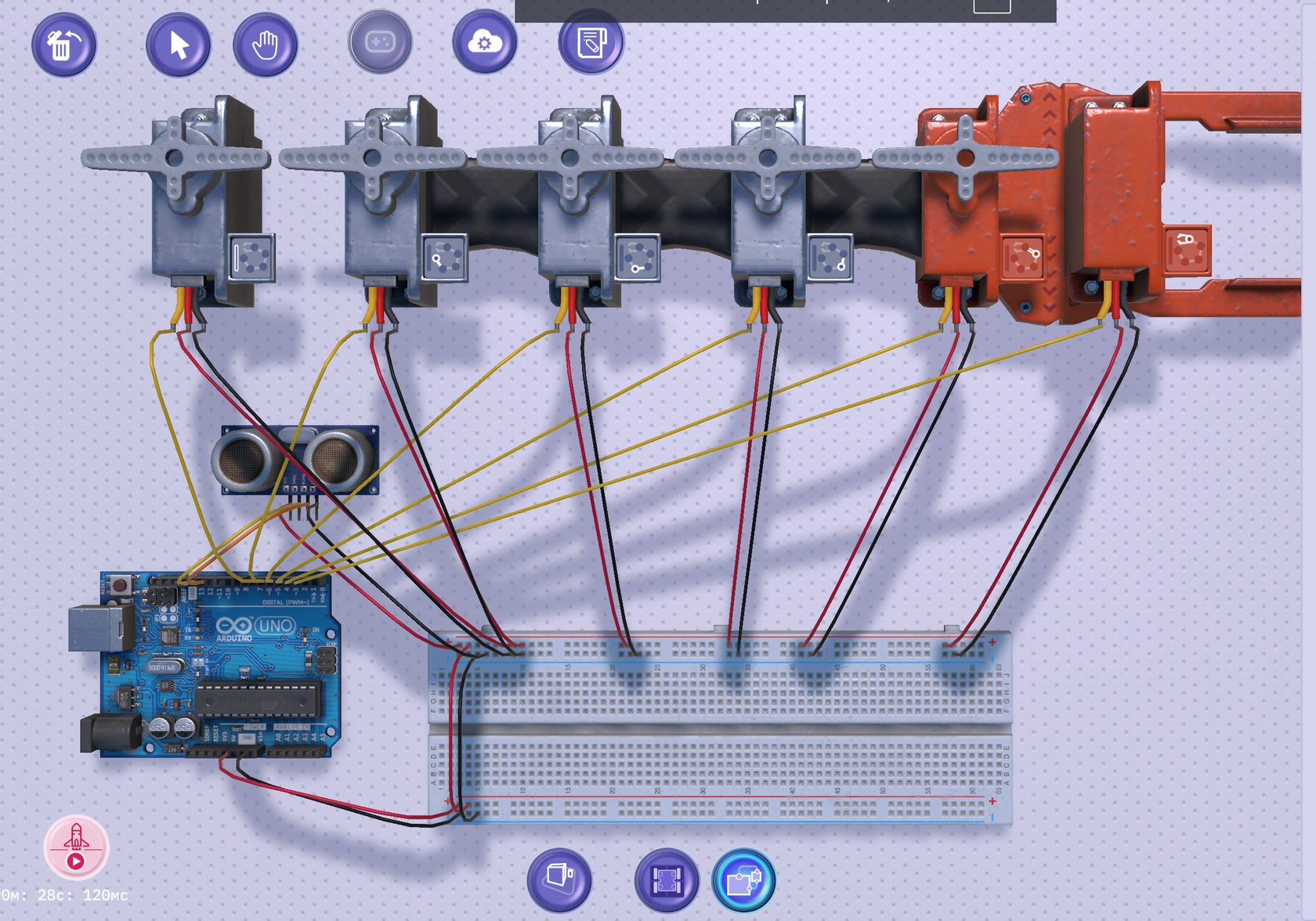
Подключение четырех-контактного мотора.
1. Красный контакт - питание 5 В
2. Cигнальный №1
3. Cигнальный №2
4. Черный - питание (GND)
1. Красный контакт - питание 5 В
2. Cигнальный №1
3. Cигнальный №2
4. Черный - питание (GND)
#include <Servo.h>
Servo s1, s2, s3, s4, s5, s6;
int trigPin = 13;
int echoPin = 12;
void setup()
{
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
s6.attach(2);
s5.attach(3);
s4.attach(4);
s3.attach(5);
s2.attach(6);
s1.attach(7);
}
int dist()
{
int duration, distance;
// для большей точности установим значение LOW на пине Trig
digitalWrite(trigPin, 0);
delayMicroseconds(2);
// включим излучатель ультразвука на короткое время
digitalWrite(trigPin, 1);
delayMicroseconds(10);
// выключаем излучатель
digitalWrite(trigPin, 0);
// узнаем длительность высокого сигнала на пине Echo
duration = pulseIn(echoPin, 1, 10000);
// рассчитаем расстояние
return distance;
}
void conf(int d1, int d2, int d3, int d4, int d5, int d6)
{
s1.write(d1);
s2.write(d2);
s3.write(d3);
s4.write(d4);
s5.write(d5);
s6.write(d6);
delay(1000/16);
}
void loop()
{
Serial.println(dist());
conf(0, 111, 25, 90, 90, 1);
}
Servo s1, s2, s3, s4, s5, s6;
int trigPin = 13;
int echoPin = 12;
void setup()
{
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
s6.attach(2);
s5.attach(3);
s4.attach(4);
s3.attach(5);
s2.attach(6);
s1.attach(7);
}
int dist()
{
int duration, distance;
// для большей точности установим значение LOW на пине Trig
digitalWrite(trigPin, 0);
delayMicroseconds(2);
// включим излучатель ультразвука на короткое время
digitalWrite(trigPin, 1);
delayMicroseconds(10);
// выключаем излучатель
digitalWrite(trigPin, 0);
// узнаем длительность высокого сигнала на пине Echo
duration = pulseIn(echoPin, 1, 10000);
// рассчитаем расстояние
return distance;
}
void conf(int d1, int d2, int d3, int d4, int d5, int d6)
{
s1.write(d1);
s2.write(d2);
s3.write(d3);
s4.write(d4);
s5.write(d5);
s6.write(d6);
delay(1000/16);
}
void loop()
{
Serial.println(dist());
conf(0, 111, 25, 90, 90, 1);
}