
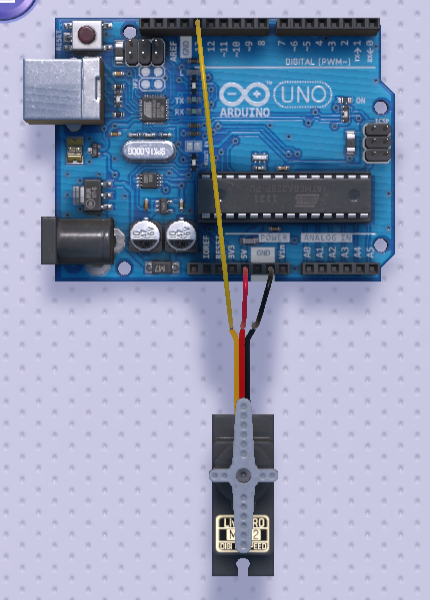
Подключение сервопривода:
1. Сигнальный пин (в цифровой пин платы)
2. Красный - питание 5 В
3. Черный - питание (GND)
1. Сигнальный пин (в цифровой пин платы)
2. Красный - питание 5 В
3. Черный - питание (GND)
Программный код:
#include <Servo.h>
Servo s1;
void setup() // описание всех подключенных портов
{
s1.attach(13);
}
void loop() // Программа для движения сервопривода
{
s1.write(90);
delay(500);
s1.write(0);
delay(500);
}
#include <Servo.h>
Servo s1;
void setup() // описание всех подключенных портов
{
s1.attach(13);
}
void loop() // Программа для движения сервопривода
{
s1.write(90);
delay(500);
s1.write(0);
delay(500);
}