
Движение робота
Для создание первой программы потребуется стандартный робот с двумя колесами.
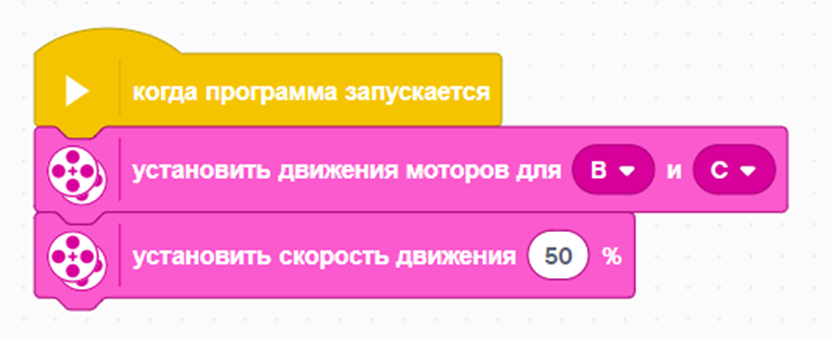
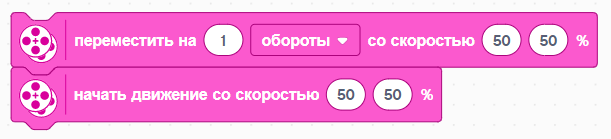
Любую программу, где робот будет перемещаться рекомендую начинать вот с этих блоков. Первый определяет какие именно моторы робота отвечают за движение (проверьте куда идут провода от моторов), ведь их может быть установлено больше двух, поэтому может выбрать не правильную пару моторов для движения.
Последний блок устанавливает скорость на все будущие блоки движения, при этом не запуская движение.
Последний блок устанавливает скорость на все будущие блоки движения, при этом не запуская движение.
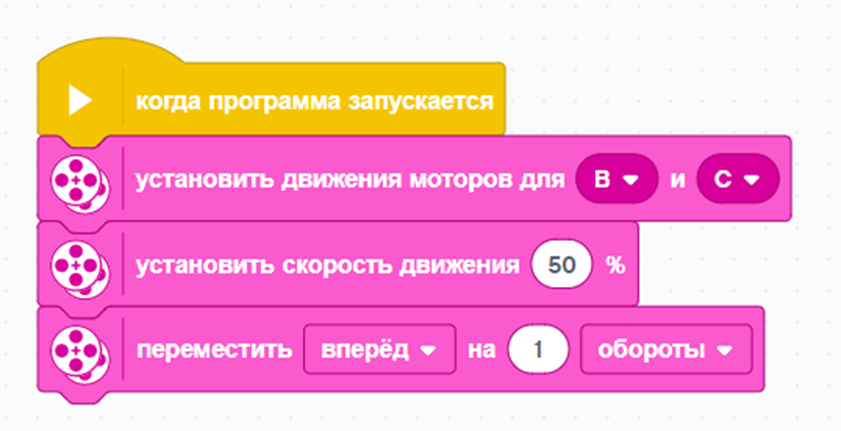
Добавив к нашей программе блок «Переместить _ на _ » мы уже получаем полноценную программу движения для робота. По ней робот проедет вперед на 1 оборот колеса. Вместо оборотов мы можем выбрать градусы или секунды. С секундами все просто, а вот градусы нужны для точного управления положением робота. Каждый градус в 360 раз меньше оборота и позволяет делать очень маленькие и точные движения. Настройка вперед/назад – меняет направление вращения.
Направление движения также можно изменить знаком перед мощностью, градусами или оборотами. Если указать движение назад и поставить отрицательную мощность – робот поедет вперед!
Блок переместить «прямо» на «_»
Блок переместить «прямо» на «_»
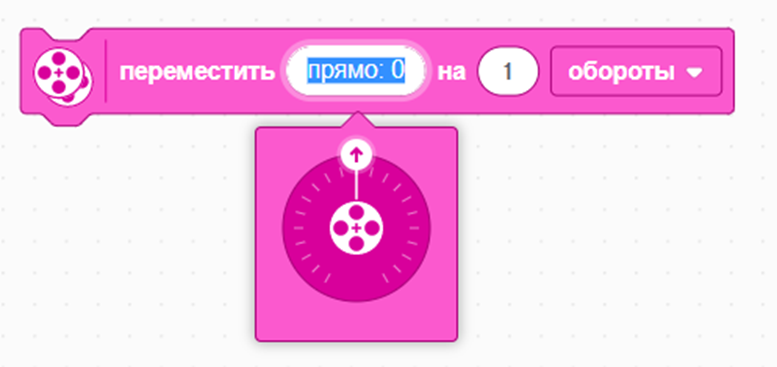
Этот блок позволяет роботу ехать не только прямо вперед или назад, но и по дуге, вокруг колеса или вращаться на месте. Для понимания его работы приведем таблицу мощностей колес при разных положениях настройки.
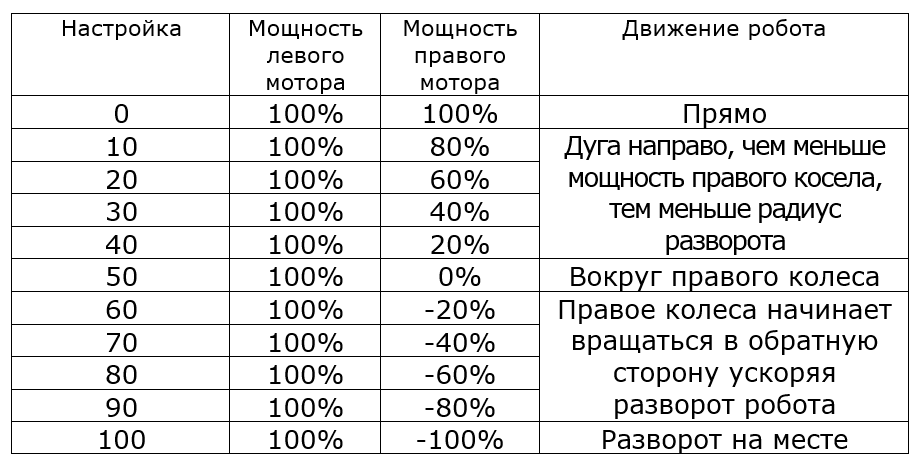
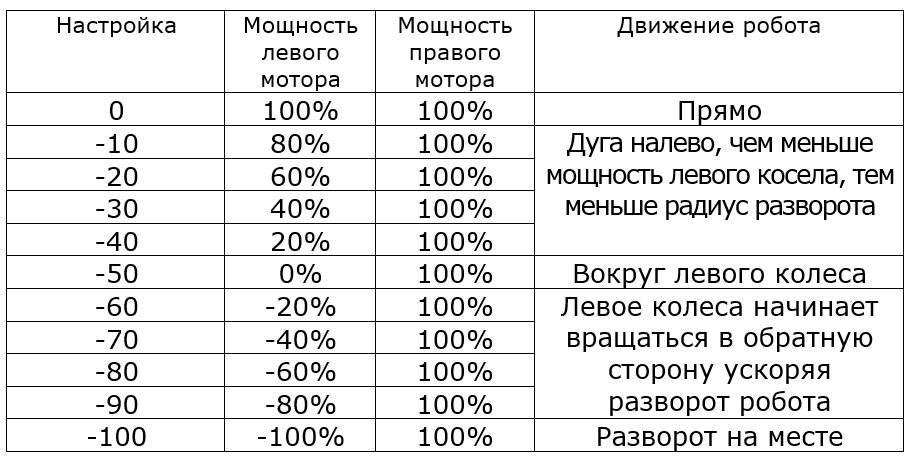
Мощность в данном случае используется не абсолютная, а от заданной. Например, в начале программы стоит блок «Установить скорость движения на 20». Тогда за 100% принимается именно 20, а остальные значения пропорционально уменьшаются.
Power – установленная скорость робота.
Power – установленная скорость робота.

Можно отдельно управлять мощностью каждого мотора при помощи следующих блоков
У робота есть 2 варианта как вести себя при остановке после движения, свободно вращаться или резко остановится. Это управляется следующим блоком:
